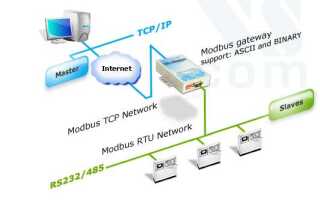
Интеграция промышленных контроллеров Modbus с мессенджером Telegram позволяет реализовать оперативное уведомление о состоянии оборудования, аварийных ситуациях и изменениях параметров в реальном времени. Это особенно актуально для распределённых объектов, где нет постоянного присутствия персонала, но требуется немедленная реакция на события.
Для отправки сообщений в Telegram с устройства, использующего Modbus RTU или TCP, необходимо промежуточное программное звено – шлюз или скрипт, принимающий данные по протоколу Modbus и отправляющий их в Telegram через HTTP API. Наиболее устойчивое решение – использование Python-скрипта с библиотеками pymodbus и python-telegram-bot, работающего на одноплатном компьютере (например, Raspberry Pi) или промышленном шлюзе.
Рекомендуется настроить периодический опрос Modbus-регистров с интервалом от 1 до 10 секунд, в зависимости от критичности параметров. При превышении пороговых значений или при возникновении дискретных событий (например, срабатывание защиты, открытие шкафа, обрыв связи) скрипт формирует структурированное текстовое сообщение и отправляет его в заранее определённый Telegram-чат. Для защиты от спама следует реализовать логику подавления повторяющихся сообщений и ограничение по частоте отправки.
Для получения сообщений необходимо зарегистрировать бота через @BotFather и сохранить токен доступа. ID чата можно получить с помощью отправки сообщения и анализа ответа API через /getUpdates. Все соединения осуществляются по HTTPS, что обеспечивает достаточный уровень безопасности при условии использования уникальных токенов и фильтрации входящих команд.
Такой подход обеспечивает масштабируемое и независимое от SCADA-систем решение, позволяющее получать критические уведомления напрямую в Telegram даже при отсутствии основного сервера визуализации.
Выбор аппаратной платформы с поддержкой Modbus и сетевых интерфейсов
Для организации передачи сообщений из Telegram по данным Modbus критично правильно выбрать аппаратную платформу, обеспечивающую стабильную работу с промышленным протоколом и одновременную интеграцию в сеть. Основные требования – наличие интерфейсов RS-485/RS-232, поддержка Modbus RTU/TCP, а также Ethernet или Wi-Fi для выхода в интернет.
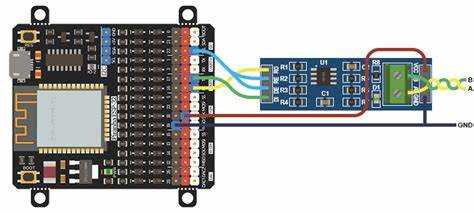
Контроллеры на базе ESP32 подходят для бюджетных решений с Modbus RTU. Они оснащены UART-интерфейсами, встроенным Wi-Fi и могут использоваться с библиотеками Modbus Master/Slave. Подключение к Telegram осуществляется через HTTP-запросы к Bot API. Недостаток – нестабильность при высоких нагрузках и ограниченный температурный диапазон.
Для промышленных условий рекомендуется использовать контроллеры на базе ARM Cortex-A с предустановленным Linux. Например, платы Raspberry Pi 4, Orange Pi 5 или устройства от ICP DAS и WAGO. Они поддерживают Modbus TCP через программные библиотеки (libmodbus, pymodbus) и позволяют использовать полноценные Telegram-клиенты. Ethernet-порт обеспечивает надежную сетевую связность, а наличие USB облегчает подключение USB-RS485 конвертеров.
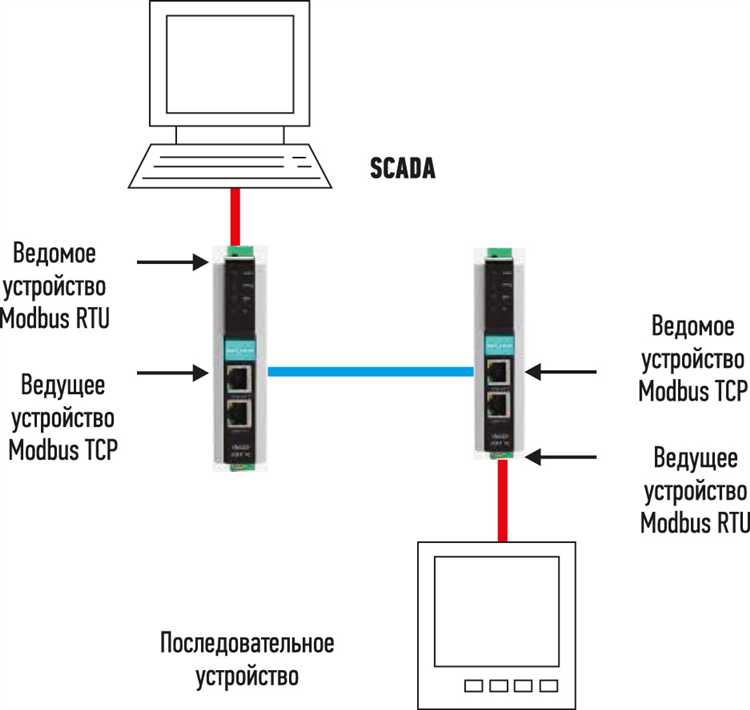
Если требуется высокая отказоустойчивость и сертификация для промышленного применения, предпочтение стоит отдать ПЛК с прямой поддержкой Modbus TCP/RTU и встроенными средствами для сетевого взаимодействия. Примеры: Siemens S7-1200 (через CM1241 и Ethernet-модули), Schneider M221, OWEN ПЛК110. Эти устройства интегрируются с SCADA и обеспечивают стабильный опрос Modbus-устройств, а передача данных в Telegram возможна через внешний шлюз, например на базе Linux-системы.
Выбор зависит от условий эксплуатации, требований к скорости опроса и уровню интеграции с облачными сервисами. Для прототипов и малых проектов достаточно ESP32. Для промышленной автоматизации – только проверенные ПЛК или промышленные компьютеры с поддержкой Modbus и средствами выхода в интернет.
Настройка параметров протокола Modbus RTU или TCP для обмена данными
Для стабильного обмена данными между контроллером Modbus и шлюзом, отправляющим сообщения в Telegram, необходимо правильно задать параметры протокола. Конкретные настройки зависят от выбранного типа соединения – RTU или TCP.
- Modbus RTU: используется через последовательные интерфейсы (RS-485/RS-232). Требует точного согласования параметров на всех устройствах шины.
- Скорость передачи (baud rate): рекомендуется выбирать 9600, 19200 или 38400 бит/с. Более высокие значения увеличивают риск ошибок на длинных линиях связи.
- Четность (parity): чаще всего используется Even или None. Убедитесь, что настройки совпадают у всех устройств.
- Стоп-биты: 1 или 2 в зависимости от оборудования. Используйте 1, если другое не требуется явно.
- Количество бит данных: 8 – стандартное значение, не изменяйте без необходимости.
- Идентификатор ведомого устройства (slave ID): должен быть уникальным в пределах одной линии. При конфликтах – данные не будут получены.
- Интервал опроса: от 200 до 1000 мс. Чем меньше интервал, тем выше нагрузка на линию и шлюз.
- Modbus TCP: работает через Ethernet и требует настройки сетевых параметров.
- IP-адрес контроллера: должен быть статическим и вне зоны DHCP сервера.
- Порт: стандартный – 502. Изменение допускается только при наличии межсетевых ограничений.
- Таймаут соединения: устанавливайте не менее 500 мс, чтобы избежать разрывов при временных задержках сети.
- Максимальное количество одновременных подключений: задается на стороне сервера (контроллера), типичное значение – 5–10.
- Проверка доступности: используйте ping и telnet к порту 502 до начала обмена.
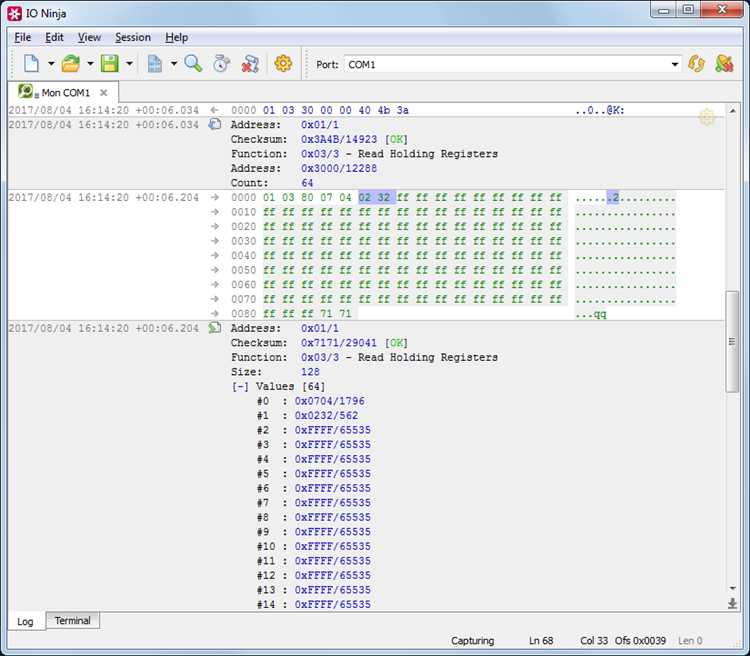
После настройки убедитесь в корректности параметров через тестовый запрос с помощью Modbus-мастера (например, Modbus Poll или QModMaster). Ошибки CRC или таймауты указывают на неправильную конфигурацию или нестабильную линию связи.
Организация считывания данных с Modbus-регистров контроллера

Для точного и стабильного получения данных от контроллера по протоколу Modbus необходимо чётко определить структуру опрашиваемых регистров и грамотно реализовать алгоритм обмена. Основное внимание следует уделить адресации, типу регистров и частоте опроса.
- Определите точные адреса регистров. Уточняйте, начинается ли адресация с нуля – это зависит от конкретного устройства и библиотеки Modbus.
- Разграничьте типы регистров: holding registers (0x03) и input registers (0x04) используются для чтения разных типов данных. Ошибки в типе функции ведут к некорректным результатам.
- Проверьте формат данных. Большинство контроллеров используют 16-битные слова, но значения могут быть представлены как float, int32, либо в формате с фиксированной точкой. Неправильная интерпретация битов приведёт к искажённой информации.
- При работе с float и int32 обязательно учитывайте порядок байтов (Big Endian или Little Endian). Используйте маски и перестановку байт при необходимости.
- Оптимизируйте количество запросов. Считывайте диапазоны регистров, а не отдельные ячейки. Это снижает нагрузку на шину и повышает устойчивость связи.
Для реализации на практике можно использовать библиотеку pymodbus (Python):
- Инициализируйте TCP или RTU-клиент с корректными параметрами (порт, скорость, паритет).
- Подключитесь к устройству и выполните чтение диапазона регистров с помощью функции
read_holding_registersилиread_input_registers. - Обработайте полученные данные с учётом типа и порядка байтов. Преобразуйте в нужный формат (например, с использованием
struct.unpack).
Избегайте частых запросов без задержек. Установите интервал опроса не менее 250–500 мс, если не требуется высокая частота обновления. При наличии нескольких устройств на шине добавляйте паузу между запросами к разным slave-адресам для предотвращения конфликтов.
Тестирование следует выполнять на этапе интеграции: используйте Modbus-эмуляторы и анализаторы трафика (например, Modbus Poll или Wireshark с фильтрацией Modbus/TCP).
Выбор метода отправки сообщений в Telegram: API или бот
При интеграции контроллера Modbus с Telegram необходимо определить, какой способ передачи сообщений наиболее целесообразен: прямой вызов Telegram Bot API или использование готового Telegram-бота с дополнительной логикой.
Telegram Bot API – это HTTP-интерфейс, позволяющий отправлять сообщения напрямую через POST-запросы. Такой подход подходит для систем с микроконтроллерами или PLC, способными выполнять HTTP-запросы. Достаточно знать токен бота и ID получателя (chat_id). Пример запроса: https://api.telegram.org/bot<ваш_токен>/sendMessage?chat_id=. Этот способ дает полный контроль над отправкой, не требует внешнего ПО и обеспечивает минимальную задержку при доставке сообщений.
Использование Telegram-бота со сторонней логикой подразумевает работу через промежуточный сервер, где бот может фильтровать сообщения, обрабатывать данные, собирать статистику или реализовывать очередь отправки. Такой подход полезен, если необходимо масштабирование, логирование событий или защита от несанкционированного доступа. Однако это увеличивает сложность архитектуры и требует серверных ресурсов.
Если контроллер способен обращаться к интернету и требуется только уведомление без сложной логики – предпочтительнее прямой вызов API. При необходимости интеллектуальной обработки, хранения истории, авторизации пользователей – целесообразно внедрение серверного бота с собственной логикой.
Создание Telegram-бота и получение токена доступа
Откройте приложение Telegram и найдите пользователя @BotFather. Это официальный бот для управления другими ботами.
Отправьте команду /newbot. Укажите имя бота, затем задайте уникальное имя пользователя, оканчивающееся на bot (например, modbusNotifierBot).
После успешного создания BotFather вернёт токен доступа – длинную строку вида 123456789:AAE...XyZ. Этот токен используется для аутентификации запросов к Telegram Bot API.
Скопируйте токен и сохраните в конфигурационный файл проекта, например, config.json, без публикации в открытом коде. Пример:
{
"telegram_token": "123456789:AAE...XyZ"
}
Проверьте работоспособность, отправив GET-запрос по адресу https://api.telegram.org/bot<ваш_токен>/getMe. В ответе должен вернуться JSON с информацией о боте. Это подтверждает корректность токена и доступ к API.
Для приёма сообщений от Modbus-контроллера бот должен иметь активный webhook или использовать метод getUpdates в цикле. Настройка webhook возможна позже после указания IP-адреса сервера.
Формирование структуры сообщений на основе данных Modbus
Структура сообщения должна содержать идентификатор устройства, тип данных, адрес регистра и само значение. Рекомендуется использовать формат JSON с обязательными полями: device_id, register_address, data_type, value. Например, {«device_id»: «01», «register_address»: «40001», «data_type»: «uint16», «value»: 12345}.
Тип данных определяется по спецификации Modbus и влияет на способ интерпретации: 16-битное целое, 32-битное с плавающей точкой или битовые флаги. Для числовых значений важно учитывать порядок байт (эндиянность) и при необходимости выполнять конвертацию.
Значения, состоящие из нескольких регистров (например, 32-битные), должны объединяться до передачи, избегая фрагментации данных. Для битовых полей эффективна упаковка в шестнадцатеричный или двоичный формат с пояснением каждой позиции.
Рекомендуется исключать из сообщения пустые или неактуальные регистры, что уменьшит размер и повысит читаемость. Форматирование следует делать в контроллере Modbus, чтобы минимизировать нагрузку на шлюз передачи Telegram.
Для подтверждения корректности структуры реализуйте в теле сообщения контрольные суммы или хеши, которые позволят получателю проверить целостность данных без дополнительных запросов.
Реализация отправки сообщений в Telegram на языке программирования контроллера
Для передачи сообщений в Telegram с контроллера Modbus необходимо реализовать взаимодействие с Telegram Bot API через HTTP-запросы. Основной механизм – отправка POST-запроса на URL вида https://api.telegram.org/bot<TOKEN>/sendMessage, где <TOKEN> – уникальный токен бота, полученный при создании.
В языке программирования контроллера важно корректно сформировать структуру запроса. В теле указывается обязательный параметр chat_id (идентификатор чата или пользователя) и text – текст сообщения. Пример формата тела для запроса:
{«chat_id»:123456789,»text»:»Сообщение от контроллера»}
Для отправки запроса обычно используется встроенный HTTP-клиент контроллера. Необходимо настроить заголовок Content-Type: application/json. Важно учитывать ограничения на длину сообщений – Telegram допускает до 4096 символов, превышение требует разбиения текста на части.
Реализация должна предусматривать обработку ошибок: проверять код ответа сервера (успешный – 200) и повторять отправку при временных сбоях связи. Рекомендуется ограничивать частоту запросов не чаще одного раза в секунду, чтобы избежать блокировки со стороны Telegram.
Для интеграции с Modbus-протоколом код контроллера формирует текст сообщения на основе считанных данных, преобразуя регистры в читаемый формат, после чего запускает функцию отправки. Рекомендуется выделить отдельную процедуру или функцию для повторного использования и удобства отладки.
Оптимальным является хранение параметров Telegram (токен, chat_id) в настройках контроллера для упрощения обновления без перепрошивки. В случае использования контроллеров с ограниченным языком программирования стоит реализовать минимальный парсер JSON или использовать простое строковое формирование запроса.
Обработка ошибок и контроль статуса доставки сообщений Telegram
Для надежной передачи сообщений Telegram, отправляемых с контроллера Modbus, необходимо реализовать многоуровневую систему обработки ошибок и подтверждения доставки. В первую очередь следует отслеживать коды ответа API Telegram: успешная отправка подтверждается статусом 200 и полем «ok»: true. Любой другой код или ответ требует анализа причины ошибки.
Типичные ошибки делятся на временные (тайм-ауты, превышение лимитов запросов) и постоянные (некорректный токен, заблокированный бот, ошибки в формате сообщения). Временные ошибки следует обрабатывать с повторными попытками с экспоненциальным интервалом, максимум 3–5 раз, чтобы избежать блокировки API. Постоянные ошибки требуют немедленного уведомления оператора для корректировки настроек.
Контроллер должен фиксировать дату и время каждой отправки с уникальным идентификатором сообщения. После успешной отправки рекомендуется отслеживать статус доставки через внутренние логи Telegram, так как API не предоставляет прямого подтверждения прочтения. Для повышения контроля допускается внедрение механизма обратной связи с пользователем в Telegram – запрос подтверждения или реакции на сообщение.
При возникновении сбоев важна регистрация подробной информации: код ошибки, тело ответа API, параметры запроса и состояние сети Modbus. Это облегчает диагностику и предотвращение повторных сбоев. Логирование должно быть реализовано с возможностью экспорта для анализа и интеграции с системами мониторинга.
В случае потери связи с контроллером или длительного отсутствия подтверждений доставки, система должна переключаться в аварийный режим и инициировать альтернативные каналы оповещения (SMS, email). Такой подход минимизирует риск пропуска критических событий и обеспечивает непрерывность контроля.
Вопрос-ответ:
Как настроить передачу сообщений Telegram с контроллера Modbus?
Для передачи сообщений Telegram с контроллера Modbus необходимо сначала подключить контроллер к сети, обеспечивающей доступ в интернет. Затем нужно настроить программное обеспечение контроллера для чтения данных через протокол Modbus и интегрировать его с Telegram-ботом. Важно зарегистрировать бота через BotFather в Telegram, получить API-токен и прописать его в настройках контроллера или промежуточного шлюза, который будет отправлять сообщения. После этого настраивается формат и условия отправки уведомлений в зависимости от параметров, считываемых с контроллера.
Какие данные контроллера Modbus можно передавать через Telegram?
Через Telegram можно передавать любые данные, которые контроллер считывает по протоколу Modbus: значения сенсоров, состояния исполнительных устройств, аварийные сигналы, параметры температуры, давления, уровня и другие. Главное — корректно обработать эти данные в контроллере или шлюзе, чтобы сформировать понятное и информативное сообщение для пользователя.
Какие требования к оборудованию необходимы для организации передачи сообщений с Modbus в Telegram?
Для организации такой передачи потребуется контроллер с поддержкой протокола Modbus и возможностью подключения к интернету (через Ethernet, Wi-Fi или сотовую сеть). Также понадобится устройство или программа, способные работать с Telegram API — это может быть встроенный модуль контроллера или отдельный шлюз/сервер, принимающий данные и отправляющий сообщения. Кроме того, нужен стабильный интернет-канал и корректно настроенный бот в Telegram.
Какие типичные ошибки могут возникнуть при отправке сообщений Telegram с контроллера Modbus?
Чаще всего возникают проблемы с неправильной настройкой API-ключа Telegram-бота, отсутствием интернет-соединения или нестабильной сетью, ошибками в формате данных, которые контроллер пытается передать, а также с тайм-аутами при обмене данными Modbus. Иногда сбои связаны с несовместимостью версий протоколов или ограничениями на стороне Telegram, если отправляется слишком много сообщений за короткий промежуток.
Как обеспечить безопасность при передаче данных Modbus через Telegram?
Безопасность достигается за счёт использования защищённых каналов связи (например, VPN или SSL) между контроллером и шлюзом, а также правильной настройки прав доступа к Telegram-боту — ограничить, кто может получать сообщения и отправлять команды. Желательно хранить API-токен в защищённом виде и не передавать его открыто. Также стоит следить за обновлениями программного обеспечения контроллера и бота, чтобы исключить уязвимости.